➤馬達與感測器控制板
➤蜂鳴器
腳位:數位腳位8(D8)
示例程式:小蜜蜂
➤RGB三色LED燈模組
腳位:(Red:D9,Green:D10,Blue:D11)數位腳位9,10,11
示例程式:紅燈-綠燈-藍-熄燈
➤8*8點矩陣
腳位:(DIN:12,CS:A4,CLK:A5)
示例程式:站立-行走-站立-滅燈
➤超音波感測器
腳位:(Trig:A2,Echo:A3)類比腳位A2,A3
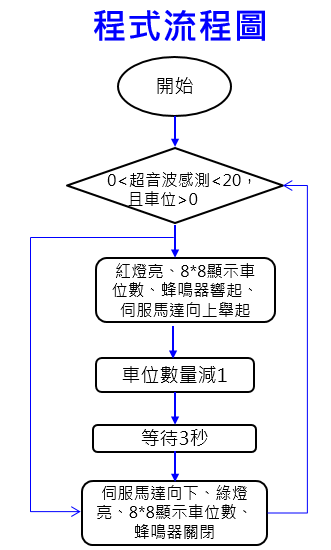
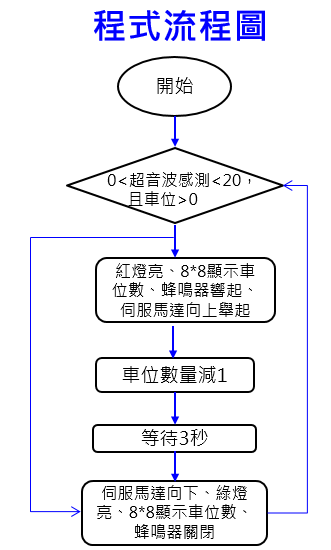
如果沒有加上距離>0,可能發生物體遠離超音波,測不出距離傳回 0,卻因為 0<10 而被誤認為距離很近。
➤搖桿
腳位:(X:A0,Y:A1,按鈕:D7)類比腳位A0,A1;數位腳位7
示例程式:使用搖桿X軸來控制 LED綠燈(接到 D10) 亮度。
不過類比輸入的 範圍是 0~1023,PWM 的範圍只有 0~255,
需要經過轉化才能將搖桿的數值拿來控制 LED 的亮度。
➤伺服馬達
腳位:(D6)數位腳位6
示例程式:按下搖桿按鈕時讓伺服馬達轉到 0 度,
放開按鈕時讓伺服馬達回到 90 度,完成柵欄放下、收起的動作。
➤減速馬達
腳位:(D2,D3)數位腳位2,3
示例程式:風扇轉動-停止-快速轉動-漸止