家卉老師的資訊教學網
標籤
打字練習
柯丁小學
Inkscape教學
krita教學
LEGO Eduction
micro:bit教學
NKNU
scratch教學
word教學
2020年10月28日 星期三
4060馬達與感測器 微課程-智慧停車場
智慧停車場
情境流程圖
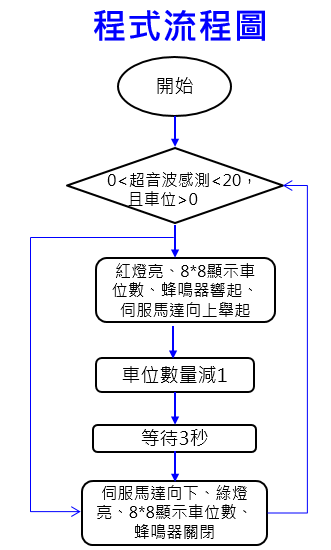
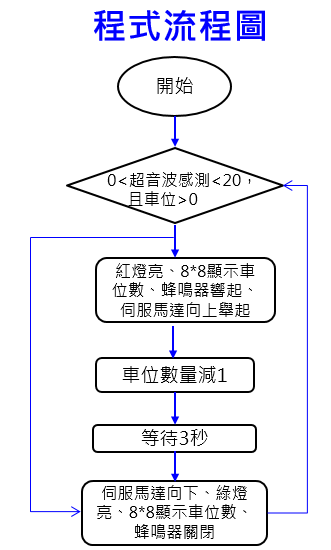
程式流程圖
程式積木堆疊
1.
變數【車位】設為
5,
變數【距離】設為超音波腳位感測到的數值
2.柵欄先放下,如果
0<
變數【距離】
<20
且變數【車位】
>0
,柵欄舉起,變數【車位】
-1
,
3
秒後,柵欄放下,重複直到變數【車位】
=0
3.
加上RGB模組,綠燈顯示及紅燈警示、蜂鳴器聲響警示
4.
加上8*8點矩陣,顯示現有車位
較新的文章
較舊的文章
首頁